
Mostrando entradas con la etiqueta Física. Mostrar todas las entradas
Mostrando entradas con la etiqueta Física. Mostrar todas las entradas
miércoles, 1 de diciembre de 2021
Evidente y elusivo
martes, 24 de septiembre de 2019
Luces atmosféricas

Si tienen curiosidad, aquí hay otras luces atmosféricas reportadas en otras partes del mundo:
- Luces de Hessdalen
- Luces de Min Min
- Luces de las montañas Brown
- Luces de Marfa
- Luz de Gurdon
- Luz de Colón
domingo, 3 de abril de 2016
Modelo lineal de un motor DC
El modelo lineal de un motor eléctrico de DC consiste en 2 ecuaciones diferenciales acopladas: el modelo eléctrico y el modelo mecánico. Debido a que ambos modelos están relacionados podemos escribir un modelo general el cual nos permitirá obtener una función de transferencia. En este ejemplo encontraremos la función de transferencia que relacione voltaje (entrada) con posición angular (salida). Primero, observemos el diagrama del circuito equivalente de la armadura del motor y el diagrama de cuerpo libre de rotor:
 Para obtener la ecuación diferencial para el modelo eléctrico consideramos la ley de voltajes de Kirchoff:
Para obtener la ecuación diferencial para el modelo eléctrico consideramos la ley de voltajes de Kirchoff:
 La fuerza contra-electromotriz se genera al iniciar el movimiento del rotor debido a que el campo magnético fijo del estator induce un voltaje en el devanado de la armadura (este voltaje es negativo con respecto al voltaje de entrada). La fcem es proporcional a la velocidad angular del rotor por lo que la constante Kb puede determinarse experimentalmente graficando el voltaje en las terminales del motor contra la velocidad angular del rotor (se verá que la relación no es realmente lineal en un intervalo grande pero puede usarse sólo la región lineal como una aproximación para el modelo).
La fuerza contra-electromotriz se genera al iniciar el movimiento del rotor debido a que el campo magnético fijo del estator induce un voltaje en el devanado de la armadura (este voltaje es negativo con respecto al voltaje de entrada). La fcem es proporcional a la velocidad angular del rotor por lo que la constante Kb puede determinarse experimentalmente graficando el voltaje en las terminales del motor contra la velocidad angular del rotor (se verá que la relación no es realmente lineal en un intervalo grande pero puede usarse sólo la región lineal como una aproximación para el modelo).
Para obtener el modelo mecánico consideramos la segunda ley de Newton para movimiento angular:
 Dónde J y b son el momento de inercia del rotor y el coeficiente de amortiguamiento por fricción respectivamente. Vemos que el torque es proporcional a la corriente en el motor. Asumiendo que no hay perdidas electromagnéticas, por fricción ni por calor, la potencia mecánica en el rotor debe igualar a la potencia eléctrica de manera que :
Dónde J y b son el momento de inercia del rotor y el coeficiente de amortiguamiento por fricción respectivamente. Vemos que el torque es proporcional a la corriente en el motor. Asumiendo que no hay perdidas electromagnéticas, por fricción ni por calor, la potencia mecánica en el rotor debe igualar a la potencia eléctrica de manera que :
 Por lo que el valor para el factor de fcem encontrado experimentalmente puede ser usado como valor para Kt. Observamos ahora que las ecuaciones (1) y (2) están relacionadas por la función de corriente.Para facilitar la sustitución obtendremos primero la transformada de Laplace de ambas ecuaciones:
Por lo que el valor para el factor de fcem encontrado experimentalmente puede ser usado como valor para Kt. Observamos ahora que las ecuaciones (1) y (2) están relacionadas por la función de corriente.Para facilitar la sustitución obtendremos primero la transformada de Laplace de ambas ecuaciones:
 Despejando I(s) de (4) y sustituyendo en (3) obtendremos el modelo unificado para el motor DC. Teniendo ya una sola ecuación obtenemos la función de transferencia posición/voltaje:
Despejando I(s) de (4) y sustituyendo en (3) obtendremos el modelo unificado para el motor DC. Teniendo ya una sola ecuación obtenemos la función de transferencia posición/voltaje:

Ejecutando el siguiente código en Matlab asignando algunos valores a las constantes obtenemos su respuesta al escalón unitario en lazo cerrado:
J = 3.2284E-6;
b = 3.5077E-6;
K = 0.0274;
R = 4;
L = 2.75E-6;
s = tf('s');
P_motor = K/(s*((J*s+b)*(L*s+R)+K^2))
sys_cl = feedback(P_motor,1)
step(sys_cl)
 Nota: Esto es lo que se conoce como identificación de sistema de caja blanca. Si no conocen ningún parámetro físico del motor, pueden usar el procedimiento de identificación de caja negra que describo aquí.
Nota: Esto es lo que se conoce como identificación de sistema de caja blanca. Si no conocen ningún parámetro físico del motor, pueden usar el procedimiento de identificación de caja negra que describo aquí.
Referencias:
DC Motor Position: System Modeling, University of Michigan
DC Motor, MathWorks
DC Motor, How It Works? [video subtitulado en español], Learn Engineering


Para obtener el modelo mecánico consideramos la segunda ley de Newton para movimiento angular:
Ejecutando el siguiente código en Matlab asignando algunos valores a las constantes obtenemos su respuesta al escalón unitario en lazo cerrado:
J = 3.2284E-6;
b = 3.5077E-6;
K = 0.0274;
R = 4;
L = 2.75E-6;
s = tf('s');
P_motor = K/(s*((J*s+b)*(L*s+R)+K^2))
sys_cl = feedback(P_motor,1)
step(sys_cl)

Referencias:
DC Motor Position: System Modeling, University of Michigan
DC Motor, MathWorks
DC Motor, How It Works? [video subtitulado en español], Learn Engineering
domingo, 22 de junio de 2014
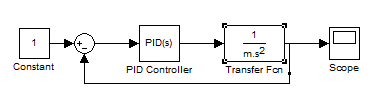
Control PID para el modelo simple de una masa móvil

Supongamos que tenemos un pequeño vehículo de masa 'm' que se encuentra en una posición inicial x0 que queremos llevar hasta una posición final xr. Para simplificar las cosas supondremos que no existe fricción entre las ruedas y el suelo ni resistencia al aire. El modelo de nuestra planta queda descrito entonces por la 2da Ley de Newton:

dónde la fuerza F(t) es la entrada y la posición x(t) nuestra salida de la planta. Obteniendo la transformada de Laplace,su función de transferencia nos queda:

Observe que cuando a 'm' se le asigna una masa unitaria G(s) se convierte en un doble integrador. Para este modelo, como debe haberse tratado en cualquier curso de control, un controlador proporcional resulta ineficaz. Un controlador de este tipo únicamente mantendría oscilando el carrito al rededor de la posición deseada sin alcanzar nunca la estabilidad. Incluso considerando la resistencia al aire, este tipo de controlador mostrará una respuesta transitoria indeseable. Para control ideal, donde el carrito acelere y desacelere suavemente hasta detenerse justo (casi en este caso sin fricción ni resistencia al aire) en la posición que queremos requerimos un controlador PID. Las ganancias para controlar un doble integrador ideal son:

Corriendo nuestro modelo en Simulink estos son son los resultados:

Suscribirse a:
Entradas (Atom)