Utilizando la App de
System Identification Toolbox de Matlab es muy sencillo estimar experimentalmente la función de transferencia de un sistema dinámico. Básicamente, existen 3 formas de identificar la planta de un sistema dinámico: el modelo de caja negra, el modelo de caja blanca y el modelo de caja gris. En el modelo de caja blanca se obtiene la función de transferencia a partir de los principios físicos conocidos sobre el sistema (que es lo que suele hacerse en un primer curso de sistemas de control al obtener la planta de un
sistema masa-resorte-amortiguador). Sin embargo, cuando se trata de sistemas reales esto o suele ser muy complicado. El método de modelado por
caja negra se encarga de estimar la función de transferencia con herramientas estadísticas utilizando únicamente una función de entrada de prueba y la función de respuesta de la planta ante dicha función:
Para la que la identificación sea certera es un requisito que u(t) tengo un ancho de banda muy amplio. Esto le permite al algoritmo de estimación tener más información disponible para la estimación del modelo. Idealmente la función que cumple con ancho de banda infinito es la delta de Dirac, sin embargo, al ser imposible de generar físicamente se opta en la practica por usar secuencias pseudoaleatorias binarias (
PRBS's). Estas secuencias pueden generarse con un registro de corrimiento de retroalimentación lineal (
LFSR) y tienen características espectrales de ruido blanco lo que las hace ideales para ser usadas como señales de prueba. La descripción de los generadores de PRBS's es todo un tema aparte del que espero escribir a detalle más adelante, pero pueden darse muy buena idea de como funcinan con
este documento.
Para esta práctica se requiere tener instalar el
paquete de soporte de Lego Mindstorms para Simulink. Pueden instalarlo ejecutando el comando
supportPackageInstaller en la ventana de comandos de Matlab y buscando Lego Mindstorms NXT. El modelo implementado en el NXT es el siguiente:
Este diagrama nos permite adquirir los datos tanto de la función de entrada como la de salida y los envía al workspace. Para poder hacer la adquisición a la PC debe ejecutarse en modo
external. [
Aquí pueden ver un video tutorial para hacer esto]. Los datos obtenidos son los siguentes:
Estas dos señales son las que utilizaremos en al app para realizar la identificación. Esta aplicación tiene una interfaz gráfica muy sencilla de utilizar.[
Aquí hay un videotutorial en español para aprender a usarla]. Después de experimentar con varias combinaciones de polos y ceros, el modelo preliminar que logró un acierto del 96.12 % fue el siguiente:
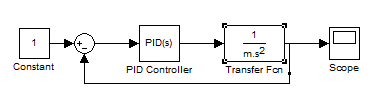
Este aún es el modelo crudo encontrado por el identificador y es necesario ajustarlo. Lo primero que salta a la vista el el termino 5,434e-11 que es despreciable y eliminaremos en el modelo final. Lo que resta es hacer un ajuste de ganancia. Para ello requerimos la respuesta experimental en lazo cerrado del motor ante un escalón unitario. Ejecutamos entonces el siguiente diagrama a bloques para poder obtenerlo:
Teniendo los datos de la respuesta experimental, debemos ahora compararlo con la respuesta teórica de nuestro modelo ajustando la ganancia hasta observar resultados favorables (debe haber algún procedimiento analítico para esto, pero lo he realizado de forma empírica). El diagrama del modelo teórico, junto con el modelo de caja blanca realizado por la Universidad Politécnica de Madrid[
1] como segunda referencia, es el siguiente:
Las respuestas fueron las siguientes:
Con esto queda verificado que la función de transferencia final de posición angular (en grados) contra potencia (%) nos queda:
La ventaja de este proceso es que puede repetirse para caracterizar la función de transferencia de los motores con carga como puede ser un brazo robótico o un robot móvil, algo que representaría un proceso tedioso con el enfoque de caja blanca. Adelantantome a la petición de los archivos: